
Die Roboter des H²T

Bei dem Design unserer humanoiden Roboter legen wir besonderes Augenmerk auf ein System, dass die Sensorik und sensor-motorischen Fähigkeiten eines Menschen möglichst genau nachahmen kann. Die Roboter sollen in der Lage sein im Haushalt mit allen Objekten und Aktivitäten des alltäglichen Lebens zurechtzukommen.
Seit 1999 bauen wir autonome humanoide Roboter, die eine große Anzahl von umfangreichen Aufgaben durchführen können. Die ARMAR-Roboter (ARMAR-I, ARMAR-II, ARMAR-IIIa and ARMAR-IIIb, ARMAR-4, ARMAR-6, ARMAR-DE und ARMAR-7) wurden gebaut, um Greifen und geschickte Manipulationsaufgaben zu unterstützen als auch aus der Beobachtung des Menschen zu lernen und zur natürlichen Mensch-Roboter-Interaktion fähig zu sein.
Unsere Forschungsaufgaben in diesem Gebiet beinhalten die Spezifikation und den Entwurf von humanoiden Komponenten, die Entwicklung dedizierter Hardware für die Signalverarbeitung und Bewegungsregelung sowie das Design von Software-Frameworks für die ganzheitliche Integration aller Komponenten auf humanoiden Robotern.
Die ARMAR-Familie
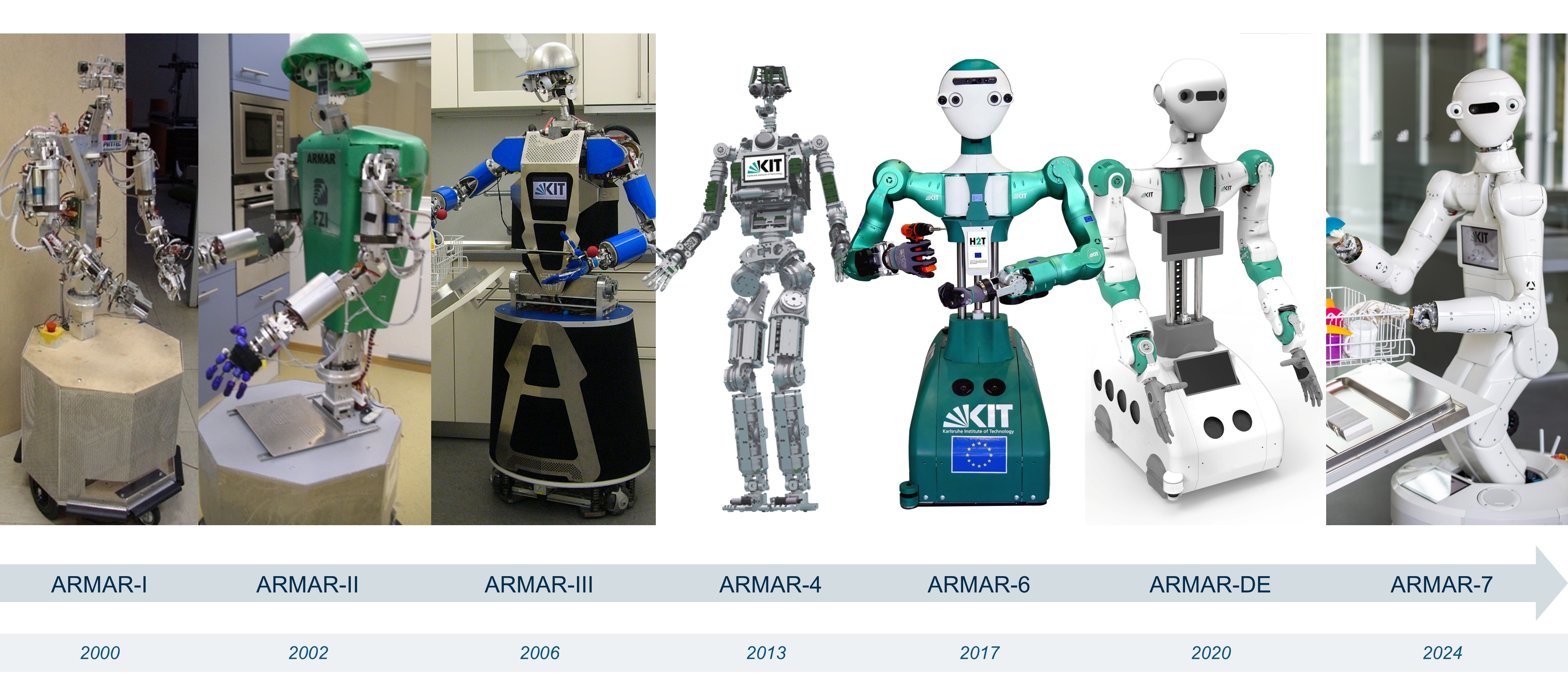
Mehr Informationen zur ARMAR-Familie
Hände

Mehr Informationen zu den Händen
Exoskelette
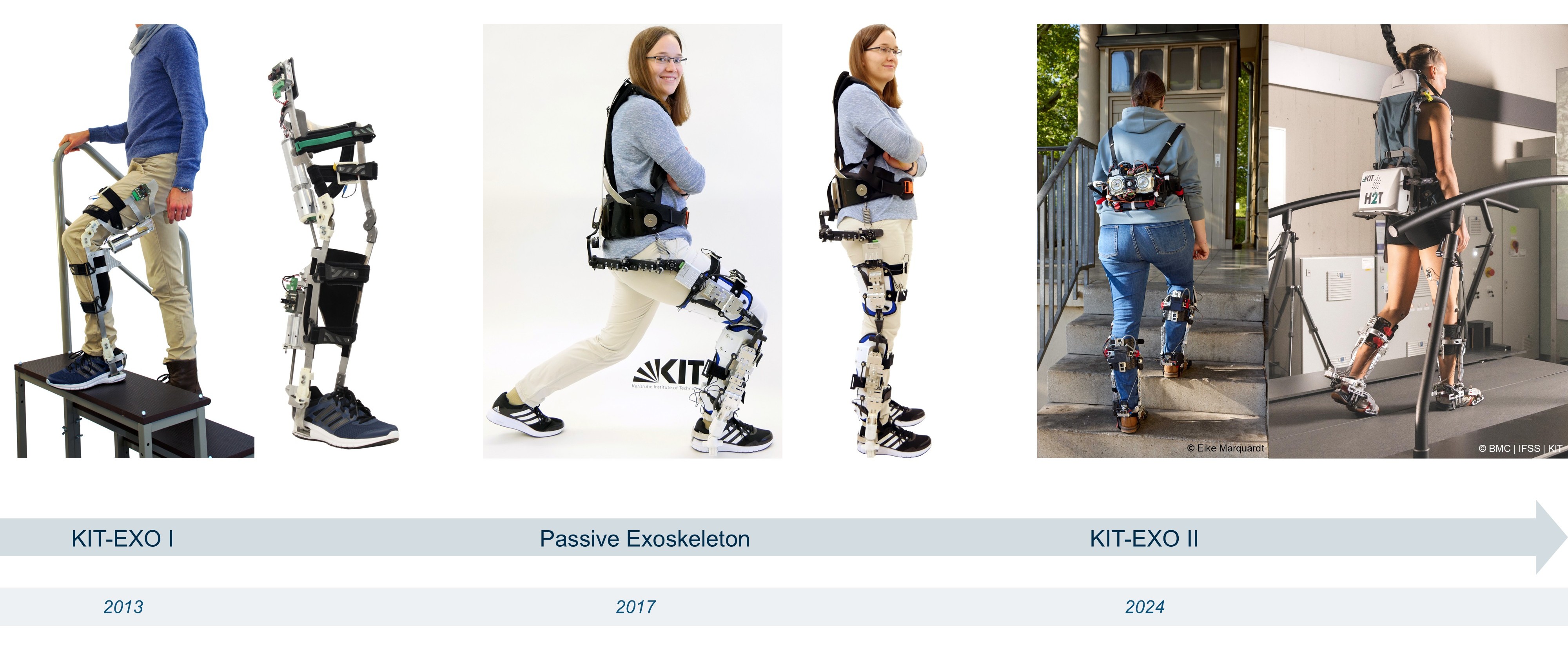
Mehr Informationen zu den Exoskeletten
Roboter-Komponenten
Mehr Informationen zu den Roboter-Komponenten
KIT Gripper
Mehr Informationen zum KIT Gripper