
Exoskelette
Am H²T entwickeln wir tragbare Exoskelett-Systeme, die die motorischen Fähigkeiten des Menschen verbessern und physiologische Einschränkungen ausgleichen sollen. Unsere Forschung zielt sowohl auf industrielle Umgebungen ab, in denen Exoskelette die Belastung des Bewegungsapparats bei sich wiederholenden oder körperlich anstrengenden Aufgaben reduzieren, als auch auf die Unterstützung älterer Menschen, die zwar ihre motorischen Funktionen beibehalten haben, aber unter verminderter Muskelkraft leiden.
Damit ein Exoskelett für den täglichen Gebrauch geeignet ist, muss es Anforderungen hinsichtlich ergonomischer Integration, biomechanischer Kompatibilität und intuitiver Mensch-Maschine-Schnittstellen erfüllen. Dementsprechend konzentriert sich unsere Forschung auf die Entwicklung kinematisch kompatibler Gelenkmechanismen, die Fehlstellungen der Gelenke und Interaktionskräfte zwischen Benutzer und Gerät minimieren. Über das mechanische Design hinaus untersuchen wir personalisierte Steuerungsarchitekturen, die multimodale Sensorik nutzen, darunter Messungen der Interaktionskräfte und Kraftmyographie (FMG), um die Absichten des Benutzers zu schätzen und vorherzusagen und die Antriebsstrategien in Echtzeit anzupassen.
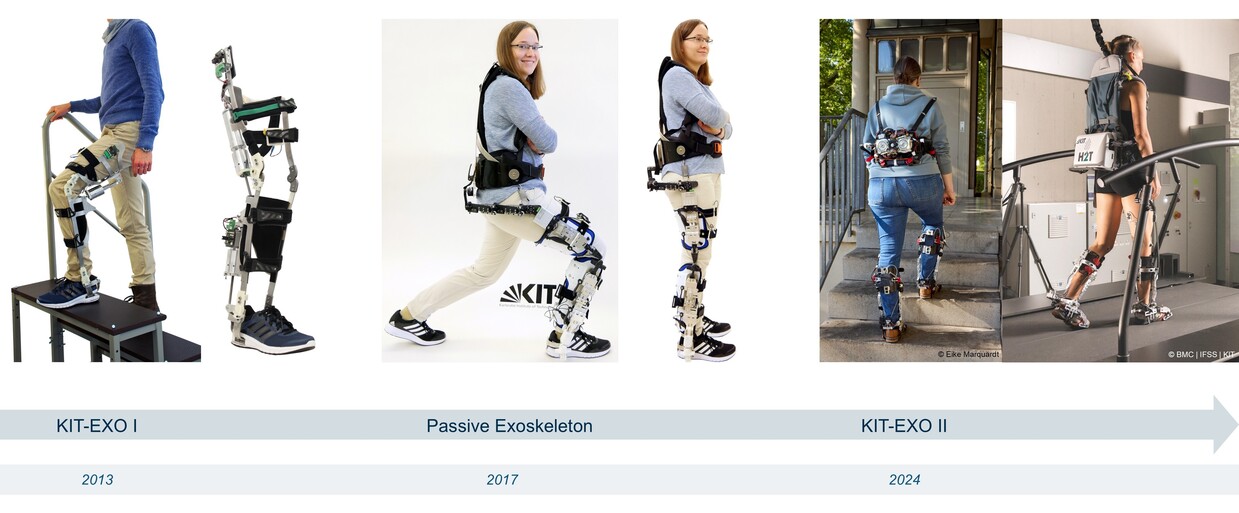
KIT-EXO II

Das 2024 eingeführte Knöchelexoskelett besteht aus einem Rahmen mit Schaft- und Fußsegmenten, die durch eine kinematische Struktur verbunden sind, die sich an die spezifischen Knöchelrotationen des Benutzers anpasst. Dieser Mechanismus basiert auf einem Parallelogramm-Mechanismus mit 11 Gelenken, der alle drei Freiheitsgrade (DoF) des Knöchels ermöglicht. Die frontale Rotationsachse ist einstellbar, um die anatomische Ausrichtung zu verbessern.
Der Fußrahmen verfügt über ein passives Gelenk für die Vorfußrotation und mehrere manuelle Einstellmöglichkeiten, um gängige Schuhgrößen (EU 38–46) und unterschiedliche Weiten zu berücksichtigen. Die Schuhe werden mit einem Kabelspannsystem und Riemen unter den Schuhen befestigt, die eine stabile Verbindung gewährleisten, ohne die Flexibilität der Schuhe einzuschränken.
Inversion/Eversion, Innen-/Außenrotation und Dorsalflexion sind passive Freiheitsgrade, während die Plantarflexion durch die symmetrische, parallele Gelenkarchitektur aktiv unterstützt wird. Eine zentral montierte Aktoreinheit wird über einen individuell einstellbaren Hüftgurt, der nahe dem Schwerpunkt positioniert ist, am Körper des Benutzers befestigt, um die Kraftübertragung und den Komfort für den Benutzer zu verbessern. Das bilaterale Exoskelett wiegt 2,4 kg (1,2 kg pro Seite) und die zentrale Aktoreinheit 3,3 kg.
Zu den integrierten Sensoren gehören Encoder, die den Winkel der Plantar-/Dorsalflexion messen, IMUs am Fußrahmen und Hüftgurt, um lineare Beschleunigungen des Fußes und Masseschwerpunktes des Nutzers zu erfassen, sowie eine eigens entwickelte Kraftmesseinheit, die die Kabelkraft und das Antriebsgelenkdrehmoment schätzt. Drei FMG-Sensoreinheiten liefern Informationen über die Muskelaktivität auf der Grundlage der resultierenden Normalkraft aus Veränderungen des Profils und der Form der drei größten und oberflächennahen Unterschenkelmuskeln: dem M. gastrocnemius medialis, dem M. gastrocnemius lateralis und dem M. tibialis anterior. Eigens angefertigte Leiterplatten (PCBs) übernehmen die Erfassung der Sensorsignale, und die Kommunikation erfolgt über EtherCAT.
Die Unterstützung des menschlichen Gelenkmomentes erfolgt durch eine kabelgesteuerte Aktorik beim Abstoßen, um die Plantarflexion des Sprunggelenks mit einem einstellbaren Drehmomentprofil zu unterstützen, das aus optimalen Unterstützungsstrategien abgeleitet wird. Der Zeitpunkt dieses Profils wird durch eine lineare Zunahme der Gangphase bestimmt, die auf der Grundlage der Dauer und der Gangereignisse der letzten fünf Schritte berechnet wird. Gangereignisse werden mit Hilfe von Force Sensing Resistors (FSR) erfasst, die in den Fersen- und Zehenbereichen einer Einlegesohle eingebettet sind.
Passives Exoskelett

Das 2017 eingeführte passive Exoskelett wurde entwickelt, um maximale kinematische Kompatibilität und Selbstausrichtung mit dem Benutzer zu erreichen. Um die Gelenkachsen vom Menschen und Exoskelett aufeinander abzustimmen, wurden Mechanismen entwickelt, die die anatomische Geometrie und die Bewegungseigenschaften der entsprechenden menschlichen Gelenke nachbilden.
Die Knie- und Sprunggelenke sind als Wälzkontaktgelenke ausgeführt, die aus zwei konvexen Flächen bestehen, die durch Kabel verbunden sind. Diese Konfiguration reproduziert die drei Rotationsfreiheitsgrade, die in den menschlichen Gelenken vorhanden sind. Das Design des Kniegelenks leitet sich direkt von der Anatomie des menschlichen Knies ab und wurde für das Sprunggelenk angepasst, um dessen charakteristische Kinematik zu reproduzieren.
Die Hüftgelenksbaugruppe besteht aus fünf Drehgelenken, drei Lineargelenken und einem Kugelgelenk, wodurch eine automatische Selbstausrichtung für Benutzer innerhalb des durch DIN 33402 definierten 5. bis 95 Perzentiles erfolgt. Zusätzliche manuelle Einstellmöglichkeiten zwischen den Segmenten ermöglichen die Konfiguration des Systems für eine Vielzahl von Körpermaßen.
Die Interaktionskräfte werden mit Hilfe von Sensoreinheiten erfasst, die in die Klettband-Schnittstellen integriert sind und in dieser Version optische Sensorelemente enthalten, die dreidimensionale Interaktionskräfte messen können. Darüber hinaus sind an jedem Exoskelett-Segment IMUs angebracht, um die Segmentausrichtung und die lineare Beschleunigung aufzuzeichnen.
KIT-EXO I

Das Exoskelett KIT-EXO I wurde im Jahr 2013 mit dem Ziel entwickelt, menschliche Fähigkeiten zu verstärken oder in der Rehabilitation eingesetzt werden zu können. Es besitzt zwei Freiheitsgrade am Knie- und oberen Sprunggelenk. Die aktiven Freiheitsgrade werden mit einem maximalen Drehmoment von 120 Nm durch einen elastischen bzw. einen steifen Aktor angetrieben, wobei die in Reihe geschaltete Elastizität zur Erhöhung der Effizienz und der Sicherheit für den Benutzer im Umgang mit dem Exoskelett dient. Um das Bein des Nutzers an der Konstruktion zu fixieren, sind Riemen aus einer kommerziellen Orthese sowie ein Sportschuh verbaut. Das KIT-EXO dient als Plattform, um neu entwickelte lineare seriell elastische Aktoren und Bewegungsklassifizierungsmethoden zu testen.
Zudem wird die Verwendung von Kraftsensoren als nicht-invasive, über der Kleidung tragbare Sensorschnittstelle erforscht, um die Interaktion zwischen dem Träger und dem Exoskelett zu erfassen. Die Sensoren sind in den Riemen am Exoskelett integriert und messen die Normalkräfte zwischen dem Bein des Nutzers und dem Exoskelett.