
Forschung am H²T
Die Entwicklung kognitiver Roboter umfasst den Aufbau eines mechantronischen Systems mit komplexen und reichhaltigen wahrnehmenden und motorischen Fähigkeiten. Hieraus ergibt sich, dass humanoiden Roboter als eine der geeignetsten experimentellen Plattformen in diesem Bereich angesehen werden können. Während einfachere Robotersysteme womöglich geeigneter sein könnten, um bestimmte Theorien in vereinfachten Umgebungen zu testen, bieten nur ganzheitliche humanoide Roboter eine reichhaltige sensorielle Eingabe und komplexe Ausführungskomponenten, die für die Untersuchung und Entwicklung höherer kognitiver Prozesse notwendig sind. Das Design eines solchen Roboters, der in der Lage sein soll mit anderen Menschen und künstlichen Agenten zu kommunizieren, ist eine herausfordernde Aufgabe. Das Zielsystem ist dafür vorgesehen mit Menschen in einer sicheren und verlässlichen Art und Weise zu interagieren. Im Besonderen soll der Roboter zur Kooperation in der Lage sein und in einen Dialog mit dem Menschen eintreten können. Des Weiteren muss der Roboter verstehen was er wahrnimmt und was er tut.
Schwerpunkte
 |
Ganzheitliche Humanoide Plattformen
Forschungsaufgaben in diesem Gebiet sind die Spezifikation und Entwurf von humanoiden Komponenten, die Entwicklung dedizierter Hardware für die Signalverarbeitung und Bewegungsregelung sowie das Design von Software-Frameworks für die ganzheitliche Integration aller Komponenten auf humanoiden Robotern. |
 |
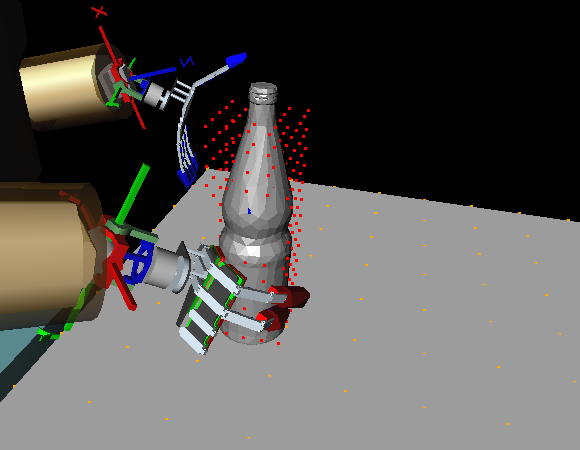
Greifen und Manipulation
Planung und Ausführung von Greif- und Manipulationsbewegungen. Die entwickelten Verfahren zur Planung von Griffen und Bewegungen werden mit unseren humanoiden Robotern in Simulation und in Realität evaluiert. |
 |
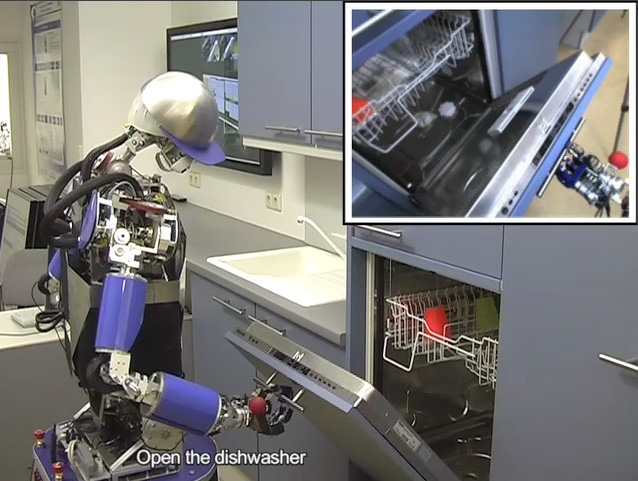
Lernen aus der Beobachtung des Menschen
Ein Schwerpunkt im Bereich der humanoiden Robotik liegt in der Akquisition neuer Fähigkeiten, welche den Roboter dazu befähigen, Alltagsaufgaben des Menschen bewältigen zu können. Basierend auf der Beobachtung des Menschen durch den Roboter werden hierzu Methoden entwickelt, welche das Erlernen dieser Fähigkeiten durch das Imitieren ermöglichen. |
 |
Wahrnehmung und Szenenexploration Die zuverlässige Wahrnehmung des Roboterumfeldes ist eine notwendige Voraussetzung für das Agieren an der Seite des Menschen. Die gezielte Exploration ermöglicht den Aufbau eines konsistenten inneren Modells der Szene und verleiht dem Roboter die Fähigkeit zur Überwachung seines Umfeldes und zur Adaption an neue Situationen. Die Wahrnehmung erfolgt dabei roboterseitig, wobei sowohl visuelle als auch haptische Sensordaten ausgenutzt werden. |
 |
Exploration Durch Exploration der Umwelt sollen humanoide Roboter ihre Wissensbasis selbstständig erweitern können. In diesem Forschungsschwerpunkt werden haptische und visuelle Explorationsstrategien entwickelt die es dem Roboter ermöglichen Repräsentationen von zuvor unbekannten Objekten zu erstellen. Ziel ist es über die erzeugten Repräsentationen dem Roboter das Greifen und Manipulieren der Objekte zu ermöglichen. Mehr Informationen |
Projekte
 |
Die Forschungsgruppe des H²T ist an Projekten des Bundesministeriums für Forschung, Technologie und Raumfahrt (BMFTR), der Deutschen Forschungsgemeinschaft (DFG), der EU und vieler weiterer Organisationen beteiligt. Mehr Informationen |