
Exoskeletons
At H²T, wearable exoskeleton systems are designed to augment human motor performance and compensate for physiological limitations. Our research targets both industrial environments, where exoskeletons reduce musculoskeletal load during repetitive or physically demanding tasks, and assistance for older adults who maintain functional motor control but exhibit reduced muscular strength.
For an exoskeleton to be suitable for daily use, it must meet requirements for ergonomic integration, biomechanical compatibility, and intuitive human–machine interfacing. Accordingly, our research focuses on the development of kinematically compatible joint mechanisms that minimize joint misalignment and interaction forces between the user and the device. Beyond mechanical design, we investigate personalized control architectures that use multimodal sensing, including interaction force measurements and force myography (FMG), to estimate and predict user intent and adapt actuation strategies in real time.
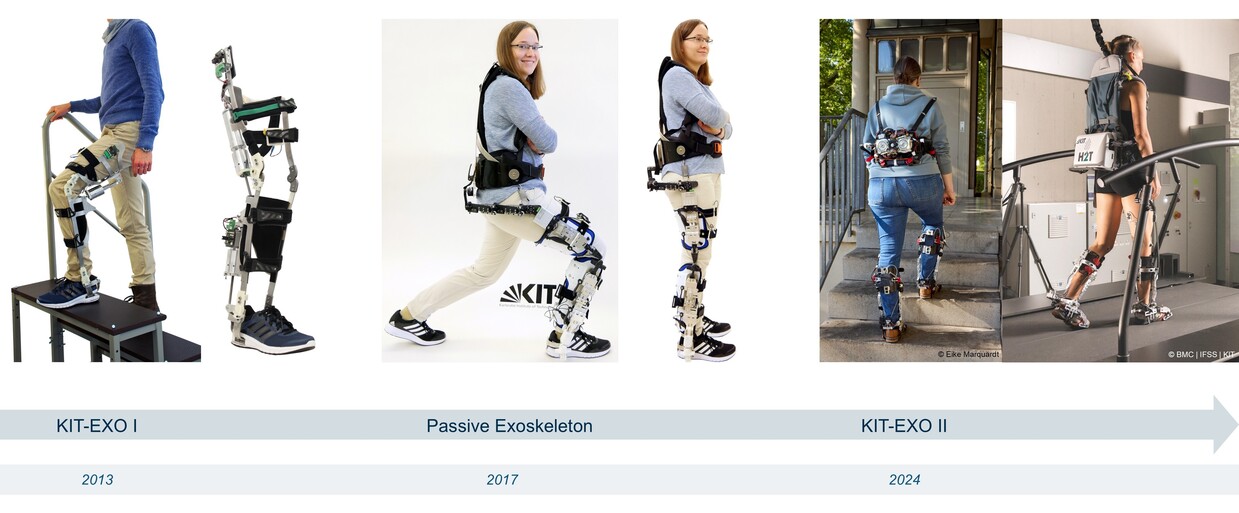
KIT-EXO II

The ankle exoskeleton introduced in 2024 consists of a rigid frame with shank and foot segments that are connected by a kinematic structure that adapts to the user's specific ankle rotations. This mechanism is based on a parallelogram linkage with 11 joints, which enables all three degrees of freedom (DoF) of the ankle. The frontal axis of rotation is adjustable to improve anatomical alignment.
The rigid foot frame incorporates one passive joint for forefoot rotation and multiple manual adjustments to accommodate common shoe sizes (EU 38–46) and varying widths. The shoes are secured with a cable-tensioning system and under-shoe straps, which ensure a stable interface without restricting shoe flexibility.
Inversion/eversion, internal/external rotation, and dorsiflexion are passive DoF, while plantarflexion is actively actuated through the symmetric, parallel joint architecture. A centrally mounted actuation unit is attached to the user's body via an individually adjustable hip belt positioned near the center of mass to improve power transmission and user comfort. The bilateral exoskeleton weighs 2.4 kg (1.2 kg per side) and the central actuation unit weighs 3.3 kg.
The integrated sensors include encoders that measure the angle of plantar/dorsiflexion, IMUs on the foot frame and hip belt to gather linear accelerations of the foot and the CoM of the user, and a custom load cell that estimates cable force and actuation joint torque. Three FMG sensor units provide information on muscle activity based on the resulting normal force from changes in the profile and shape of the three major close to the surface lower leg muscles: the gastrocnemius medialis m., the gastrocnemius lateralis m., and the tibialis anterior m. Custom printed circuit boards (PCBs) handle sensor signal acquisition, and communication is implemented via EtherCAT.
Human joint torque assistance is provided through cable-driven actuation during push-off to support ankle plantarflexion with an adjustable torque profile derived from optimal assistance strategies. The timing of this profile is determined by a linear increase in gait phase, which is calculated based on the duration and gait events of the last five steps. Gait events are detected using force-sensitive resistors (FSRs) embedded in the heel and toe areas of an insole.
Passive Exoskeleton

The passive exoskeleton introduced in 2017 was designed to achieve maximum kinematic compatibility and self-alignment with the user. To align the human and exoskeleton joint axes, mechanisms were developed that replicate the anatomical geometry and motion characteristics of the corresponding human joints.
The knee and ankle joints are implemented as rolling‑contact joints composed of two convex surfaces connected by cables. This configuration reproduces the three rotational degrees of freedom present in the human joints. The knee joint design is derived directly from human knee anatomy and was adapted for the ankle to reproduce its characteristic kinematics.
The hip joint assembly comprises five revolute joints, three prismatic joints, and one ball joint, enabling automatic self-alignment for users within the 5th to 95th height percentiles defined by DIN 33402. Additional manual adjustment interfaces between segments allow the system to be configured for a wide range of body dimensions.
Interaction forces are captured using sensor units integrated into the Velcro strap interfaces, which in this version incorporate optical sensing elements capable of measuring three-dimensional interaction forces. Furthermore, inertial measurement units (IMUs) are mounted on each exoskeleton segment to record segment orientation and linear acceleration.
KIT-EXO I

The KIT-EXO I was introduced in 2013 to augment human capabilities for rehabilitation applications. It has two degrees of freedom at the knee and ankle, which are actuated with a maximum torque of 120 Nm by an elastic or stiff actuator. The series elasticity thereby increases actuator efficiency and user safety when wearing the exoskeleton, while straps from commercial orthosis and a sports shoe are used as a human-robot interface. KIT-EXO I provides a platform for testing newly developed linear serial elastic actuators and motion classification methods.
We investigated the usage of force sensors as a noninvasive sensor interface that can be worn over the user’s clothes to capture the interaction between the user and the exoskeleton. They are attached to the Velcro straps to measure the normal interaction forces between the user's leg and the exoskeleton during operation.