
Key Research Areas
 |
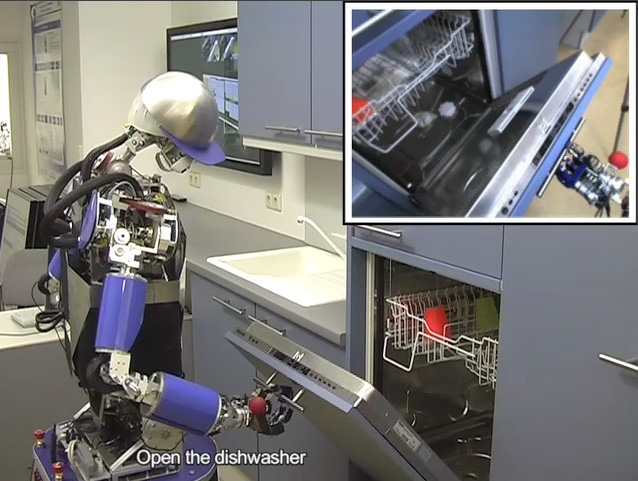
Integrated Humanoid Platform
The research activities in this area include the specification and design of humanoid components, the development of dedicated hardware for sensory data processing and motor control as well as the design of software frameworks, which allow for the integration in humanoid robots that are in rich in sensory and motor capabilities.
|
 |
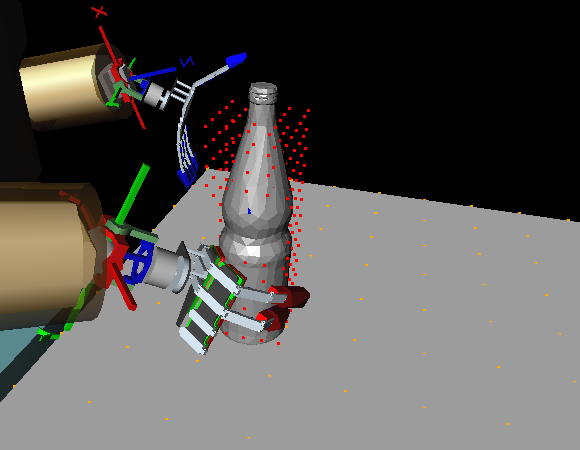
Grasping and Manipulation
Integrated apporaches for the three main tasks needed for grasping and manipulation: grasp planning, solving the inverse kinematics for redundant manipulators and planning of collision-free motions. The algorithms are evaluated in simulation and on the humanoid robot ARMAR-III. |
 |
Learning from Human Observation
A key question in the field of humanoid robotics is how a robot can acquire skills autonomously in order to cope with daily tasks in a human-centered environment. Based on the observation of the human we develop methods, which allows the learning of these skills by imitation. |
 |
Vision The research topics in this area are concerned with on-board robot vision as the primary sensorial channel to perceive the world and endow humanoid robots with the ability to adapt to changing environments. Currently, methods and techniques for object recognition and localization, self-localization, visual servoing and markerless tracking are investigated. |
 |
Exploration Humanoid Robots are supposed to constantly and autonomously expand their knowledge base by exploration of their environment. The focus of this research topic lies on haptical and visual exploration strategies that enable a robot to create representations of unknown objects. Ultimately, the representations will enable the robot to grasp and manipulate these objects. More information |